场景化机器人 — 园区智能巡检小车与工业自主搬运机器人
两款场景化机器人全流程落地:园区智能巡检小车(LSTM、YOLO、多端与 DeepSeek)与工业搬运 AMR(PID、MobileNet)。
福州大学 电气工程与自动化学院
2024年11月——2025年12月
项目背景
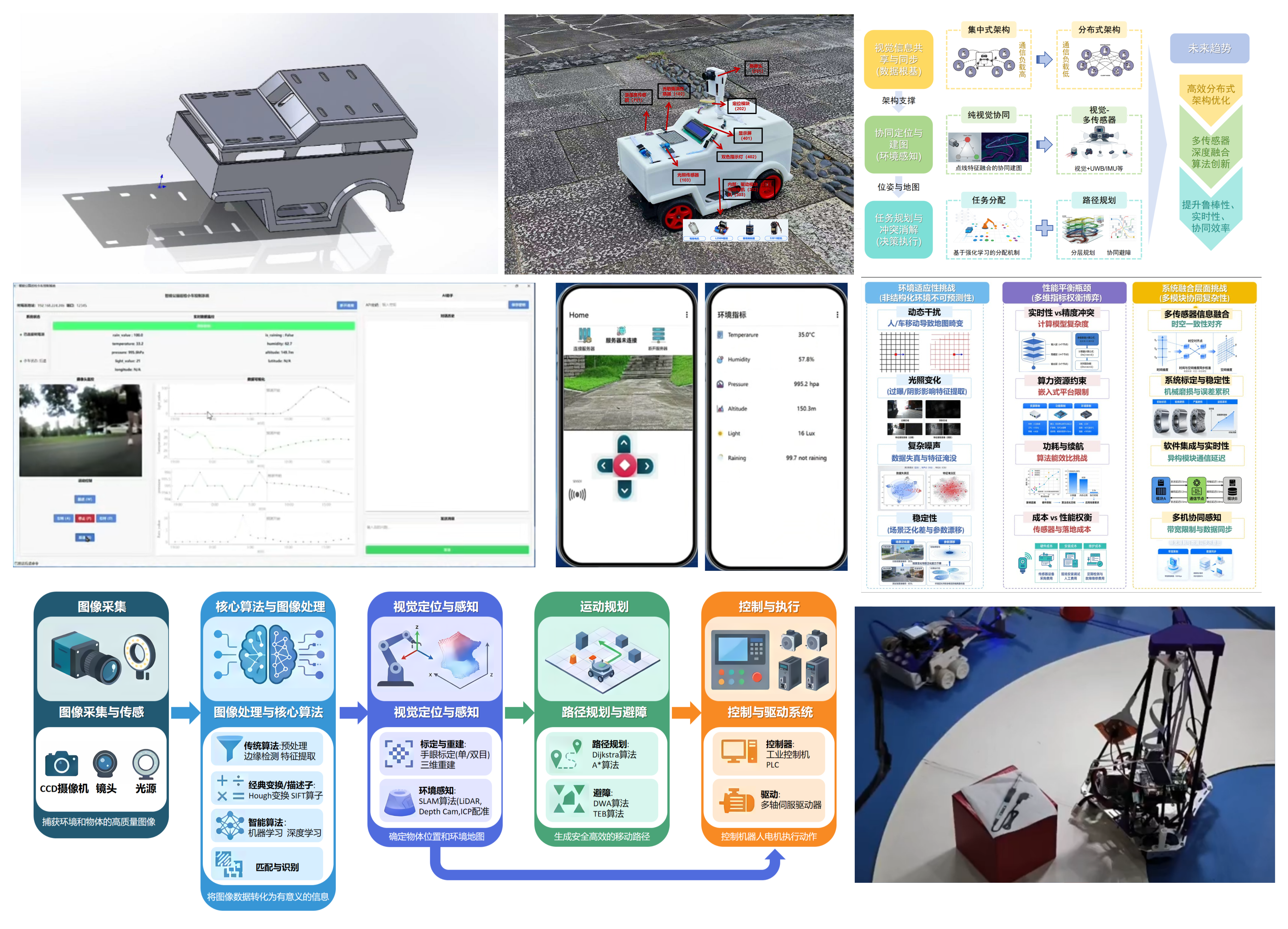
本项目面向智能移动机器人在园区运维与工业物流两类典型场景的落地需求,依托学院创新实践培养机制,将「感知—决策—执行—人机协同」贯通为可交付的整机系统。园区侧以开放环境、人流与气象扰动为约束,强调多源环境数据的时序建模、视觉安全保障与多端运维体验;工业侧以节拍、定位精度与物料识别可靠性为主线,强调运动控制与轻量视觉在嵌入式算力下的协同部署。在工程推进过程中,团队以大学生智能车竞赛等相关赛事与 iCAN 国际创新创业大赛等创新实践平台为牵引,组织需求分析、样机迭代与现场联调,把算法验证、嵌入式实现与演示答辩纳入同一套里程碑管理;在搬运方向同步开展文献调研与综述撰写,系统梳理机器视觉在搬运机器人中的技术脉络与应用进展,为后续论文与专利布局提供问题导向的研究基础,形成「竞赛驱动快速迭代 + 学术化总结沉淀」的闭环路径。
- 针对园区开放场景环境时变、传统巡检响应滞后的问题,主导开发基于双向 LSTM 与多头注意力的环境预测引擎,将温湿度、光照及降雨预测误差控制在 1.8%–4.2%、季节性误差由 31% 降至 6.5%;搭建 PyQt5 上位机与云端通信,集成行人识别(准确率 99.3%)与 1.5 m 内 0.5 s 紧急制动。
- 针对工业物流物料识别与循迹节拍要求严格的问题,面向自主搬运完成 PID 循迹控制与 MobileNet 轻量识别嵌入式部署,参与整车软硬件联调、传感器标定与智能车竞赛彩排,在竞赛工况下达到可展示指标。
- 针对搬运机器人感知瓶颈,主导构建「环境感知—路径规划—精准操作—多机协同」全栈框架并调研近百篇文献,对比几何匹配与深度学习方案,剖析 SLAM、SDF 与视触觉融合在嵌入式平台的工程壁垒,支撑《机器人技术与应用》(科技核心·CSTPCD)综述论文。
- 作为技术负责人统筹两款机器人系统测试、部署文档与问题闭环,并以互联网+、iCAN 等赛事为牵引组织样机迭代与现场联调。
项目产出
技术栈
Python, PyQt, Streamlit, MobileNet, YOLO