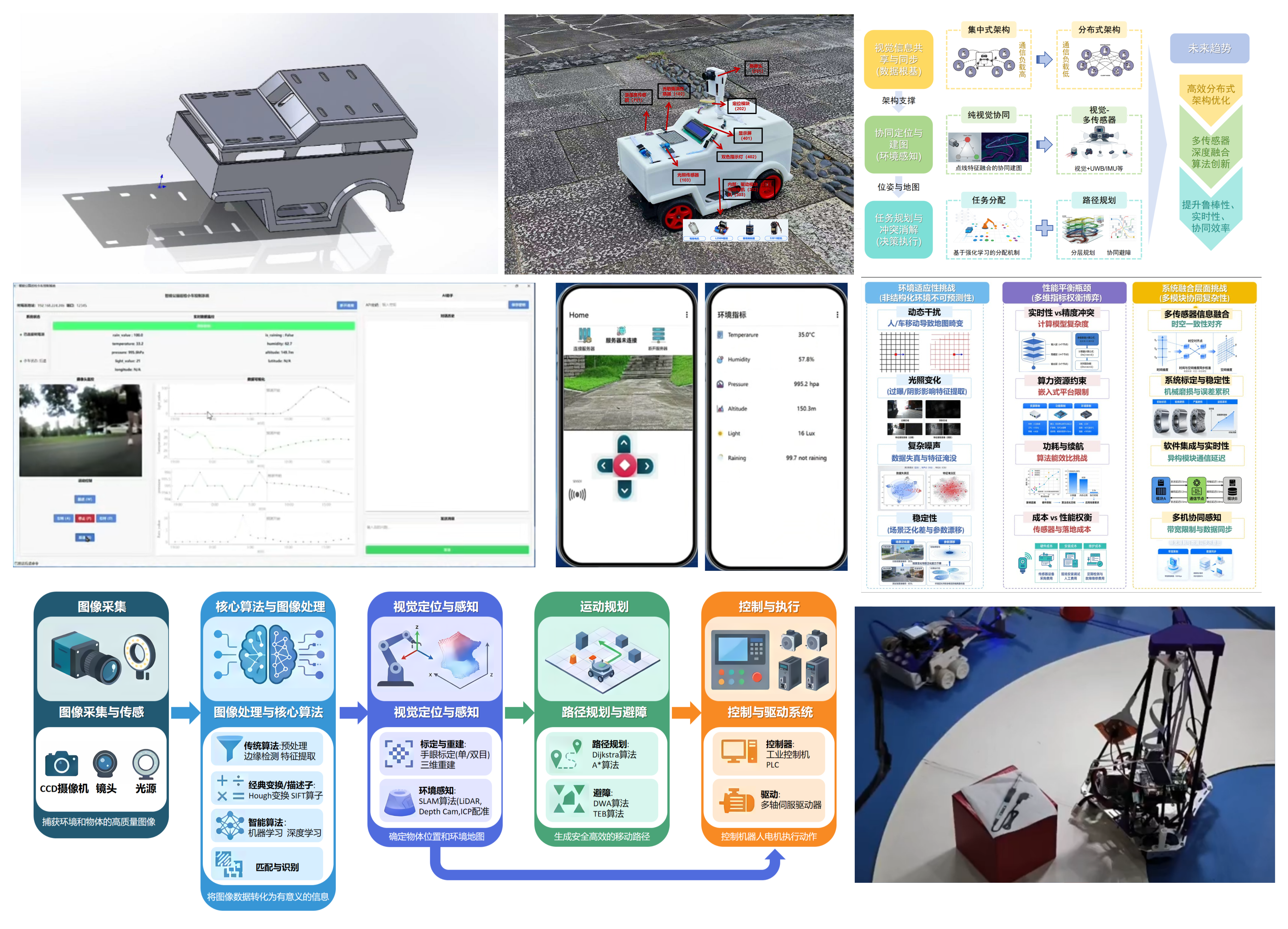
Scenario robots — campus inspection rover & industrial autonomous material handling AMR
Two scenario robots from perception to deployment: inspection rover (LSTM, YOLO, PyQt/Streamlit/mobile + DeepSeek) and industrial AMR (PID, MobileNet).
Fuzhou University College of Electrical Engineering and Automation
Nov 2024——Dec 2025
Background
This project targets deployable mobile robots in campus O&M and industrial logistics under the college’s innovation practice program, threading perception–decision–actuation–human–machine coordination into deliverable integrated systems. The campus track stresses time-series modeling of multi-source environmental data, vision-based safety, and multi-client operations under open environments, pedestrian flow, and weather variability; the industrial track stresses cycle time, positioning accuracy, and reliable material recognition, with motion control and lightweight vision co-deployed on embedded compute. Milestones are driven by university smart-car competitions and platforms such as the iCAN International Invention & Innovation Contest—covering requirements analysis, prototype iteration, and field integration, with algorithm validation, embedded implementation, and demo readiness under one timeline; on the handling side, a literature review synthesizes machine vision for mobile manipulators to support later papers and patents, forming a loop of competition-driven iteration plus academic consolidation.
- For drifting campus environments and slow patrol response, led a bidirectional LSTM + multi-head attention forecaster holding 1.8–4.2% error and cutting seasonal error from 31% to 6.5%; built a PyQt5 host with cloud connectivity, pedestrian detection (99.3%), and 0.5 s braking within 1.5 m.
- For strict logistics recognition and tracking tact, deployed PID line-following and embedded MobileNet on the autonomous transport platform with full vehicle bring-up, calibration, and smart-car contest rehearsals at showcase-ready metrics.
- For material-handling perception bottlenecks, led a full-stack framework and a ~100-paper survey comparing classical geometry with deep learning, analyzing SLAM, SDF, and visuo-tactile fusion barriers on embedded platforms, supporting the CSTPCD journal Robot Technique and Application survey.
- As technical lead, coordinated system tests, deployment docs, and issue closure on both robots, driving prototype iterations and field tuning via innovation contests including Internet+ and iCAN.
Research outputs
-
基于机器视觉的搬运机器人研究综述 A Survey of Machine Vision for Material-Handling Robots
2026 · Accepted · Robot Technique and Application (CSTPCD) · Accepted
-
一种公园专用环境智能监测巡检小车 Dedicated Intelligent Environmental Monitoring and Inspection Vehicle for Parks
2026 · Chinese utility model patent · Substantive examination
Stack
Python, PyQt, Streamlit, MobileNet, YOLO