SpaceCrafter — high-performance general on-orbit servicing system
For on-orbit servicing needs, delivered the simulation platform, multi-sensor proximity reconstruction, and solid-state LiDAR with stereo depth perception; multiple conference papers including ICGNC, AIT, and WACV.
Background
Low-Earth-orbit satellites are surging: by 2025 global LEO spacecraft have passed 12,000, with commercial constellations in dense deployment. Debris now exceeds 1.5 billion pieces, growing roughly 5–8% per year, sharpening collision risk, increasing conjunction events, and raising the count of failed satellites. Together, these trends make maintenance and debris-removal on-orbit servicing ever more urgent while the market expands quickly—establishing both the practical need and commercial rationale for the SpaceCrafter high-performance, general-purpose on-orbit servicing system.
- For on-orbit reconstruction without ground truth under thermal drift and solar saturation, led a high-fidelity platform integrating Gemini 435Le depth, Robosense E1R LiDAR, and IMU; implemented “manifold-to-point” scanning (100% topology, +7.4% local Chamfer Distance, 1.15 cm local accuracy).
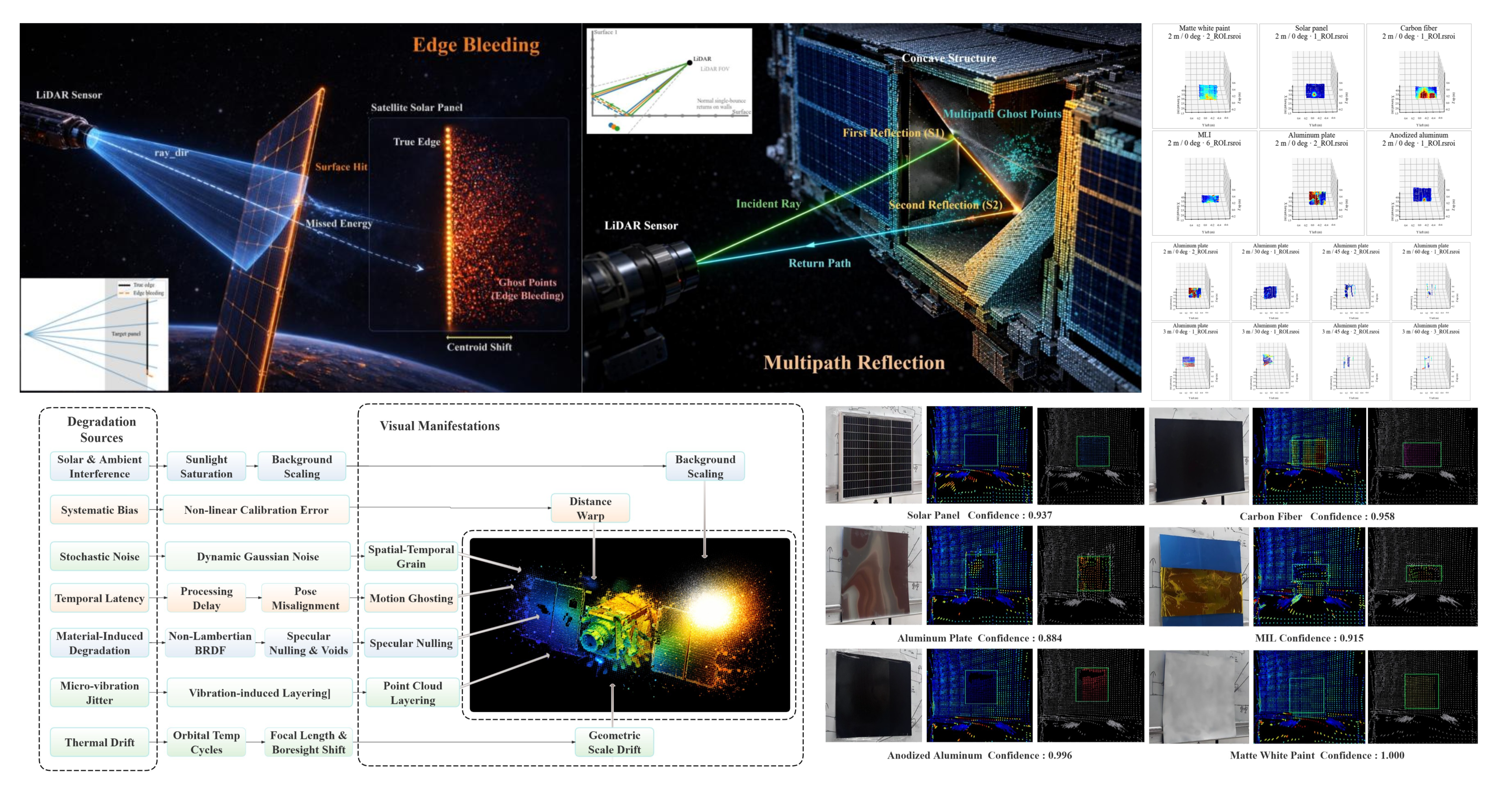
- For MLI multipath and range drift causing layering and ghosting, built physics-level degradation models and a LiDAR-only pipeline (SOR/ROR, IMU compensation, multi-frame fusion); platform tests restored >80% of ideal accuracy with 0.0672 m RMSE and 99.37% completeness under degradation.
- For scarce aerospace-material LiDAR data, brought up Robosense hardware with visualization hosts; collected SpaceMat-LiDAR in a darkroom (six material classes) and built geometry–intensity fusion models with physics-prior branches for reliable MLI/CFRP recognition, outperforming single-feature baselines.
- Modularized fly-around sampling, denoising, voxel downsampling, surface reconstruction, and material classification into a repeatable proximity-perception and material-recognition simulation base for SpaceCrafter algorithm iteration.
Research outputs
-
High-Fidelity Orbital Reconstruction: A Physics-Grounded Simulation and Two-Phase Progressive Strategy for Space Objects
2026 · Accepted · International Conference on Guidance, Navigation and Control (ICGNC 2026) · Accepted
-
Physics-aware LiDAR degradation modeling and 3D reconstruction pipeline for space target on-orbit servicing
2026 · Under Review · IEEE/CVF Winter Conference on Applications of Computer Vision (WACV 2027) · Under Review
-
Construction and Verification of SpaceMat-LiDAR Dataset for Spacecraft Material Classification in On-Orbit Servicing
2026 · Accepted · Conference on Spatial Information Technology (AIT 2026) · Accepted
Stack
Python, Open3D-style tooling, RoboSense SDK