「天工計畫」——高性能通用式空間在軌服務系統
面向在軌服務需求,完成模擬平台與多源融合近距重建及固態雷達/雙目深度感知落地;產出 ICGNC、AIT、WACV 等多篇會議論文。
中國科學院微小衛星創新研究院 衛星數位化技術重點實驗室
2026年3月——至今
專案背景
當前低軌衛星呈爆發式成長,2025年全球低軌衛星已突破 12,000 顆,各類商業星座密集規劃部署;同時太空碎片總量超過 15 億個且年均成長 5%–8%,碰撞風險持續升高,各類碰撞事件頻傳,故障衛星數量逐年增加。在此雙重驅動下,衛星維護、碎片清理等在軌服務需求日益迫切,且市場規模快速擴張,為「天工計畫」高性能通用式太空在軌服務系統的研發奠定現實基礎與市場價值。
- 針對非合作目標在軌重建缺乏真值標定、受熱漂移與太陽飽和影響之問題,主導建置整合 Gemini 435Le 深度相機、Robosense E1R 固態 LiDAR 與 IMU 之高保真模擬平台;推行「流形到點」兩階段掃描(100% 拓撲覆蓋、局部 Chamfer Distance 提升 7.4%、局部精度 1.15 cm)。
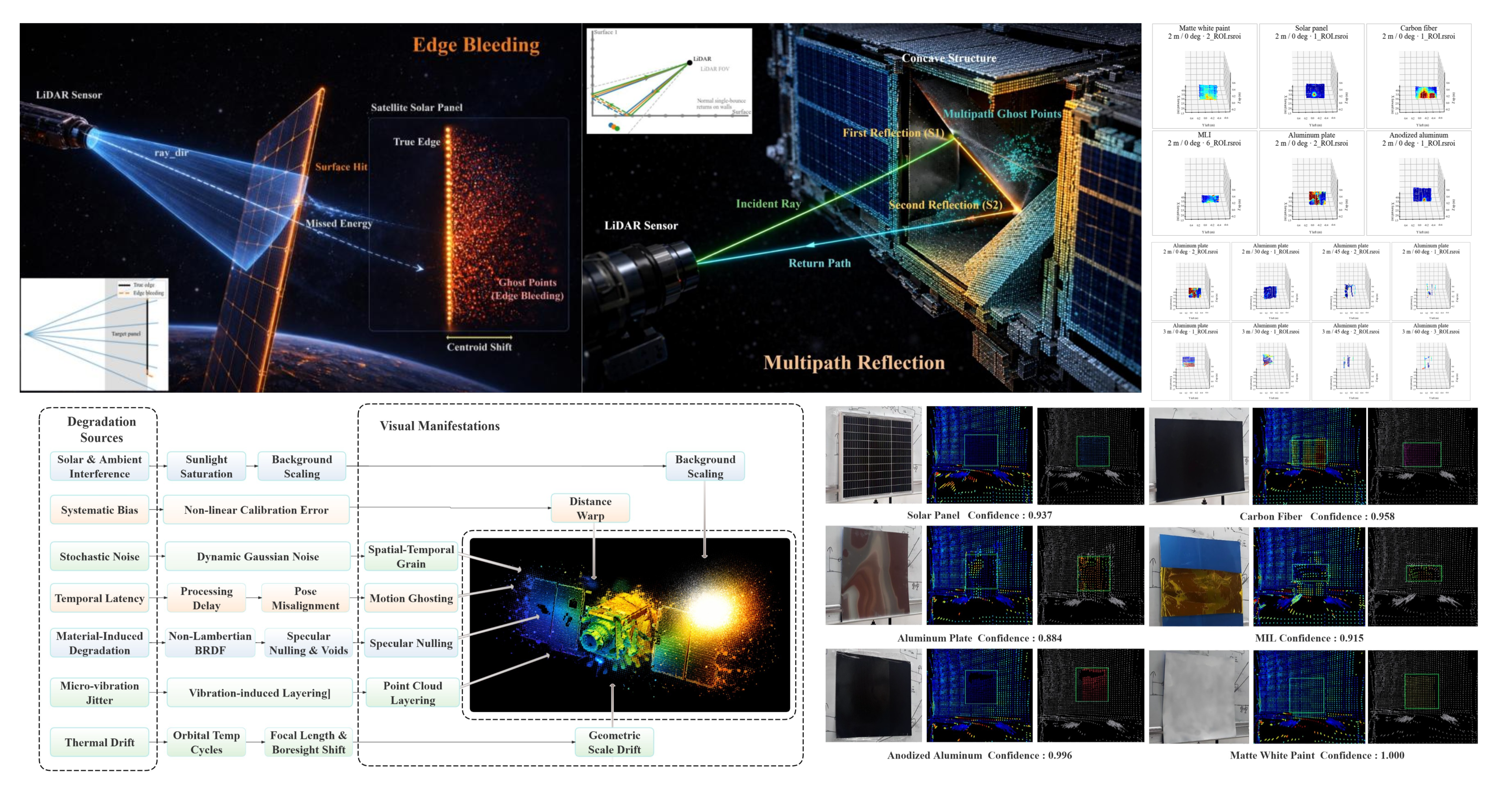
- 針對 MLI 多徑、測距漂移等導致 LiDAR 點雲分層與鬼影之問題,建立物理機理級退化模型並最佳化 LiDAR-only 重建流水線(SOR/ROR、IMU 補償、多幀融合);依托高保真平台驗證退化場景精度恢復達理想基線 80% 以上、RMSE 達厘米級(0.0672 m)、完備性 99.37%。
- 針對航天材料識別難、LiDAR 資料匱乏之問題,完成 RoboSense 固態雷達整機適配與點雲視覺化上位機;於暗室條件下採集並建立 SpaceMat-LiDAR 真實資料集(六類典型材料),建構融合幾何與強度之識別模型,引入物理先驗分支有效識別 MLI 與 CFRP 等材料,性能顯著優於單一特徵基線。
- 模組化開發繞飛軌跡採樣、點雲濾波降噪、體素降採樣、表面重建及航天材料分類識別等功能並完成端到端聯調,形成可重複運行之近距感知與材料識別一體化仿真底座,為「天工計畫」在軌服務非合作目標感知演算法迭代提供統一試驗環境。
專案產出
-
High-Fidelity Orbital Reconstruction: A Physics-Grounded Simulation and Two-Phase Progressive Strategy for Space Objects 高保真軌道重建:面向太空目標的物理仿真與兩階段漸進策略
2026 · 已錄用 · 國際制導、導航與控制學術會議(ICGNC 2026) · 已錄用
-
Physics-aware LiDAR degradation modeling and 3D reconstruction pipeline for space target on-orbit servicing 物理感知 LiDAR 退化建模與太空目標在軌服務三維重建流水線
2026 · 審稿中 · IEEE/CVF Winter Conference on Applications of Computer Vision(WACV 2027) · 審稿中
-
Construction and Verification of SpaceMat-LiDAR Dataset for Spacecraft Material Classification in On-Orbit Servicing 面向在軌服務太空器材料分類的 SpaceMat-LiDAR 資料集建構與驗證
2026 · 已錄用 · 空間資訊科技大會(AIT 2026) · 已錄用
技術棧
Python, Open3D-style tooling, RoboSense SDK