立方星近距位姿估計與對接控制系統(16U在軌服務平台)
16U近距會合:視覺位姿與 Jetson 部署,GNC、容積卡爾曼融合與電噴霧調控;產出 IAC、ICGNC 等論文及多項發明專利。
中國科學院微小衛星創新研究院 衛星數位化技術重點實驗室
2026年1月——至今
專案背景
隨著太空技術與商業航天快速發展,在軌服務需求日益突出:大型在軌服務衛星成熟可靠,但造價高、任務風險承受能力弱,難以滿足快速響應;立方星成本低、研製週期短,適合作為服務載體,卻受體積與成本約束,尚難形成可複用、具備完整對接與服務能力的通用平臺。推進方面,化學推進在立方星上局限明顯,水基電推進憑藉綠色無毒、多模態工作與太空原位資源利用潛力,正成為重要方向。本專案據此研製搭載多模態水基推進器與多功能對接機構的立方星在軌服務平臺,透過雙星在軌演示驗證推進、對接及交會對接演算法,為太空碎片清理、在軌加注、航天器救援等高頻次在軌服務任務提供技術支撐。
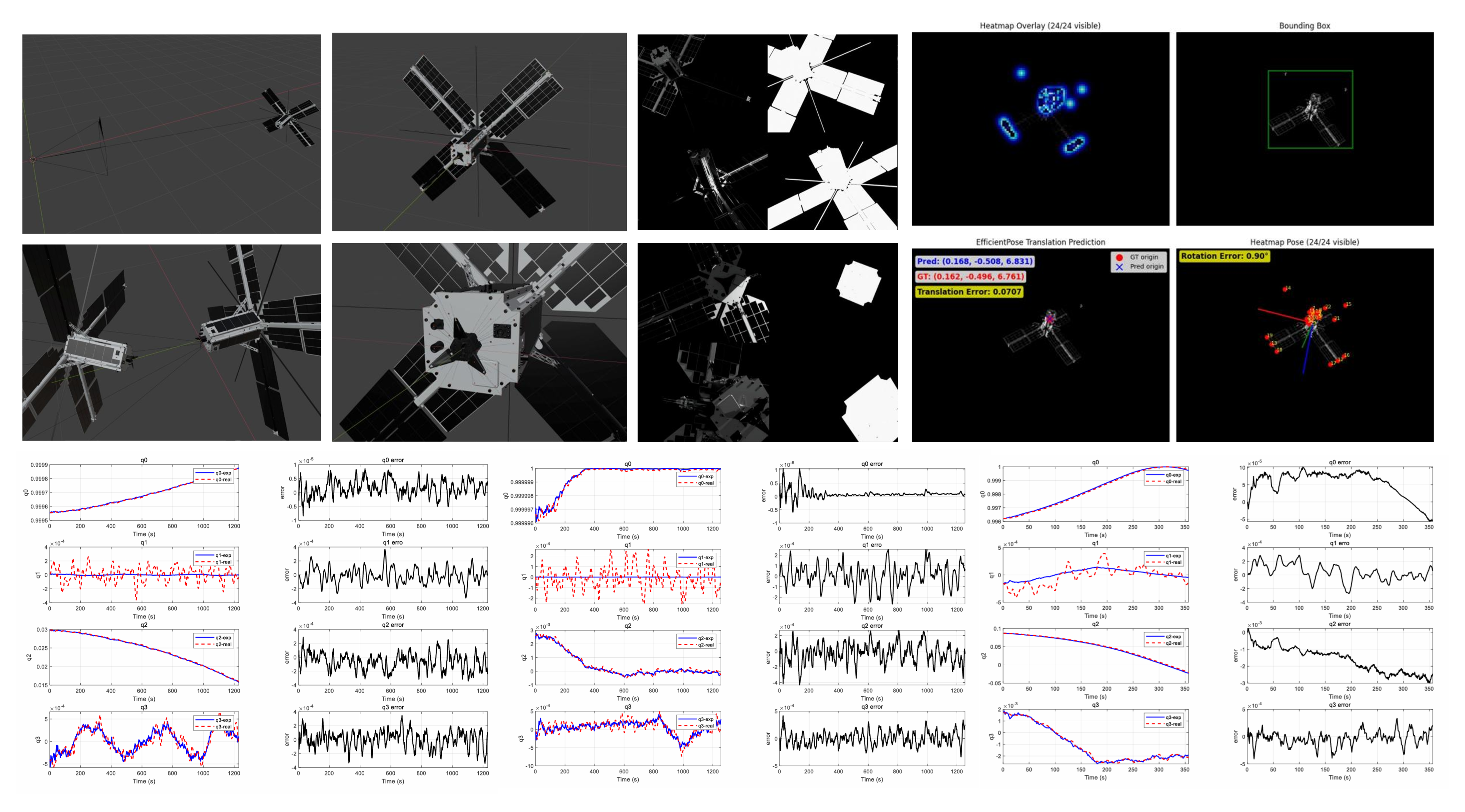
- 針對近距交會中關鍵點出界、遮擋導致位姿誤差放大及在軌資料稀缺之問題,基於 SPNv2 擴展多任務 6-DoF 估計(EfficientDet-B3+BiFPN、可見性感知損失),主導搭建 1–10 m 接近與 0.1–1 m 對接兩階段高保真合成資料集(10 萬+ 樣本),於 Jetson Orin NX 完成 TensorRT 部署(單幀約 35 ms)。
- 針對微納衛星交會非線性與燃料平衡挑戰,建構 MEE 動力學模型並設計基於 CKF 的雷射/視覺融合導航及 PMP 引導策略,實現 100 m 至 0.02 m 全流程覆蓋,節燃 62.88%、終端估算誤差控制在 5 mm 以內;設計分散式 6-DoF 協同控制實現高低推力 ≤1 s 切換,±30% 擾動下對接精度優於 0.0148 m。
- 針對 400 km LEO、180° 大相位差交會的時間—燃料矛盾,建立 MEE 高保真動力學與三類水推進策略統一對比口徑,PID 切換將推力紋波抑制在 ±5% 內並整合 Lambert 與 PMP 軌跡求解;複合策略較純高推力節燃 73.1%、較燃料最優低推力縮短任務時間 12.5%(84 小時)。
- 針對電推進地面標定與羽流表徵缺少統一閉迴路流程之問題,協助開發 Arduino 可程式化高壓掃描、羽流訊號濾波與斜率分析,以及 Einzel 透鏡羽流角靜電控制仿真(發散角由 20° 壓縮至 12° 以內)等方案,支撐百尖端陣列、阻滯電位分析、地面電流測量等多項發明專利。
專案產出
-
Low-Cost Versatile On-Orbit Servicing CubeSat with Refuellable Multimodal Water-Propellant Propulsion System 低成本多功能在軌服務 CubeSat 與可補給多模態水推進系統
2026 · 已錄用 · International Astronautical Congress(IAC 2026) · 已錄用
-
Orbital Maneuver Study of High-Low Thrust Combined Multimodal Water Propulsion for On-Orbit Servicing 高低推力組合多模態水推進在軌服務軌道機動研究
2026 · 已錄用 · 國際制導、導航與控制學術會議(ICGNC 2026) · 已錄用
-
Preliminary Design of GNC System and Multi-mode Propulsion Cooperative Control for Micro-Nano Satellite Autonomous Rendezvous and Docking 微納衛星自主交會對接 GNC 系統與多模式推進協同控制初步設計
2026 · 審稿中 · 中國空天安全研討會(CASS 2026) · 審稿中
-
一种百尖端阵列式多孔电喷雾微推力器 一種百尖端陣列式多孔電噴霧微推力器
2026 · 中國發明專利 · 單位內部審核中
-
一种用于电推进羽流特性表征的阻滞电势分析系统及测量方法 一種用於電推進羽流特性表徵的阻滯電勢分析系統及測量方法
2026 · 中國發明專利 · 單位內部審核中
-
一种基于双附加电极与 Einzel 透镜的电喷雾推力器羽流角静电控制方法 一種基於雙附加電極與 Einzel 透鏡的電噴霧推力器羽流角靜電控制方法
2026 · 中國發明專利 · 單位內部審核中
-
一种用于地面测试的电喷雾推力器多维度电流自动测量系统 一種用於地面測試的電噴霧推力器多維度電流自動測量系統
2026 · 中國發明專利 · 單位內部審核中
技術棧
Python, PyTorch, TensorRT, MATLAB/Simulink, Jetson Orin NX